
သုံးဆင့် asynchronousမော်တာသည် 380V သုံးဆင့် AC လျှပ်စီးကြောင်း (အဆင့်ကွာခြားချက် 120 ဒီဂရီ) ကို တစ်ပြိုင်နက်ချိတ်ဆက်ခြင်းဖြင့် လည်ပတ်သော induction မော်တာအမျိုးအစားတစ်ခုဖြစ်သည်။ သုံးဆင့် asynchronous မော်တာ၏ rotor နှင့် stator လည်ပတ်နေသော သံလိုက်စက်ကွင်းသည် တူညီသောဦးတည်ချက်နှင့် မတူညီသောအမြန်နှုန်းများဖြင့် လည်ပတ်သောကြောင့် slip rate ရှိသောကြောင့် သုံးဆင့် asynchronous မော်တာဟုခေါ်သည်။
သုံးဆင့် asynchronous မော်တာ၏ rotor ၏ အမြန်နှုန်းသည် လည်ပတ်နေသော သံလိုက်စက်ကွင်း၏ အမြန်နှုန်းထက် နိမ့်သည်။ rotor winding သည် သံလိုက်စက်ကွင်းနှင့် ဆွေမျိုးရွေ့လျားမှုကြောင့် electromotive force နှင့် current ကို ထုတ်ပေးပြီး သံလိုက်စက်ကွင်းနှင့် အပြန်အလှန် သက်ရောက်မှုရှိပြီး electromagnetic torque ကို ထုတ်ပေးကာ energy transformation ကို ရရှိစေပါသည်။
single phase asynchronous နှင့် နှိုင်းယှဉ်ခြင်းမော်တာများ, သုံးဆင့် asynchronousမော်တာများလည်ပတ်မှုစွမ်းဆောင်ရည် ပိုမိုကောင်းမွန်ပြီး ပစ္စည်းအမျိုးမျိုးကို သက်သာစေနိုင်သည်။
မတူညီသော rotor ဖွဲ့စည်းပုံများအရ three-phase asynchronous motor များကို cage type နှင့် wound type အဖြစ် ခွဲခြားနိုင်သည်။
cage rotor ပါရှိသော asynchronous မော်တာသည် ရိုးရှင်းသောဖွဲ့စည်းပုံ၊ ယုံကြည်စိတ်ချရသောလည်ပတ်မှု၊ ပေါ့ပါးမှုနှင့် ဈေးနှုန်းသက်သာမှုတို့ရှိပြီး ကျယ်ကျယ်ပြန့်ပြန့်အသုံးပြုခဲ့ကြသည်။ ၎င်း၏အဓိကအားနည်းချက်မှာ မြန်နှုန်းထိန်းညှိရာတွင် အခက်အခဲဖြစ်သည်။
wound three-phase asynchronous မော်တာ၏ rotor နှင့် stator တို့တွင် three-phase windings များတပ်ဆင်ထားပြီး slip rings၊ brushes များမှတစ်ဆင့် external rheostat နှင့်ချိတ်ဆက်ထားသည်။ rheostat ၏ resistance ကိုချိန်ညှိခြင်းဖြင့် မော်တာ၏ starting performance ကိုတိုးတက်စေပြီး မော်တာ၏ speed ကိုချိန်ညှိနိုင်သည်။
သုံးဆင့် asynchronous မော်တာ၏ အလုပ်လုပ်ပုံ အခြေခံမူ
သုံးဆင့် stator winding တွင် symmetrical three-phase alternating current ကို အသုံးပြုသောအခါ၊ လည်ပတ်နေသော သံလိုက်စက်ကွင်းတစ်ခု ဖြစ်ပေါ်လာပြီး ၎င်းသည် synchronous speed n1 ဖြင့် stator နှင့် rotor ၏ အတွင်းပိုင်းစက်ဝိုင်းနေရာတစ်လျှောက် နာရီလက်တံလည်ပတ်သည်။
လည်ပတ်နေသော သံလိုက်စက်ကွင်းသည် n1 အမြန်နှုန်းဖြင့် လည်ပတ်သောကြောင့်၊ rotor conductor သည် အစတွင် ငြိမ်သက်နေသောကြောင့်၊ rotor conductor သည် stator လည်ပတ်နေသော သံလိုက်စက်ကွင်းကို ဖြတ်တောက်ပြီး induced electromotive force ကို ထုတ်လုပ်ပေးလိမ့်မည် (induced electromotive force ၏ ဦးတည်ရာကို Right-hand rule ဖြင့် ဆုံးဖြတ်သည်)။
ရိုတာ လျှပ်ကူးပစ္စည်း၏ နှစ်ဖက်စလုံးတွင် ရှော့ပတ်လမ်းကွင်းတစ်ခုကြောင့် ဖြစ်ပေါ်လာသော လျှပ်စစ်မော်တီအား၏ လုပ်ဆောင်ချက်အောက်တွင် ရိုတာ လျှပ်ကူးပစ္စည်းသည် ဖြစ်ပေါ်လာသော လျှပ်စစ်မော်တီအားနှင့် အခြေခံအားဖြင့် တူညီသော ဦးတည်ချက်တွင်ရှိသော လျှပ်စစ်မော်တီအားကို ထုတ်ပေးပါသည်။ ရိုတာ၏ လျှပ်စီးကြောင်းကို သယ်ဆောင်သော လျှပ်ကူးပစ္စည်းသည် စတာ သံလိုက်စက်ကွင်းတွင် လျှပ်စစ်သံလိုက်အားကို ခံရပါသည် (အား၏ ဦးတည်ချက်ကို ဘယ်ဘက်စည်းမျဉ်းကို အသုံးပြု၍ ဆုံးဖြတ်ပါသည်)။ လျှပ်စစ်သံလိုက်အားသည် ရိုတာရိုးတံပေါ်တွင် လျှပ်စစ်သံလိုက် torque ကို ထုတ်ပေးပြီး ရိုတာကို လည်ပတ်နေသော သံလိုက်စက်ကွင်း၏ ဦးတည်ချက်အတိုင်း လည်ပတ်စေရန် မောင်းနှင်ပါသည်။
အထက်ဖော်ပြပါ ခွဲခြမ်းစိတ်ဖြာမှုအရ လျှပ်စစ်မော်တာ၏ အလုပ်လုပ်ပုံနိယာမမှာ အောက်ပါအတိုင်းဖြစ်သည်ဟု ကောက်ချက်ချနိုင်သည်- မော်တာ၏ သုံးဆင့် stator windings (တစ်ခုစီတွင် လျှပ်စစ်ထောင့်ကွာခြားချက် ၁၂၀ ဒီဂရီရှိသည်) ကို သုံးဆင့် symmetrical alternating current ဖြင့် လည်ပတ်သောအခါ၊ လည်ပတ်နေသော သံလိုက်စက်ကွင်းတစ်ခု ဖြစ်ပေါ်လာပြီး rotor winding ကို ဖြတ်တောက်ကာ rotor winding တွင် induced current ကို ထုတ်ပေးသည် (rotor winding သည် closed circuit ဖြစ်သည်)။ လျှပ်စီးကြောင်းကို သယ်ဆောင်သော rotor conductor သည် stator လည်ပတ်နေသော သံလိုက်စက်ကွင်း၏ လုပ်ဆောင်ချက်အောက်တွင် electromagnetic force ကို ထုတ်ပေးလိမ့်မည်။ ထို့ကြောင့် electromagnetic torque ကို မော်တာ shaft ပေါ်တွင် ဖွဲ့စည်းပြီး လည်ပတ်နေသော သံလိုက်စက်ကွင်းနှင့် တူညီသော ဦးတည်ချက်အတိုင်း လည်ပတ်စေရန် မော်တာကို မောင်းနှင်သည်။
သုံးဆင့် asynchronous မော်တာ၏ ဝါယာကြိုးပုံ
သုံးဆင့် asynchronous မော်တာများ၏ အခြေခံဝါယာကြိုးချိတ်ဆက်မှု-
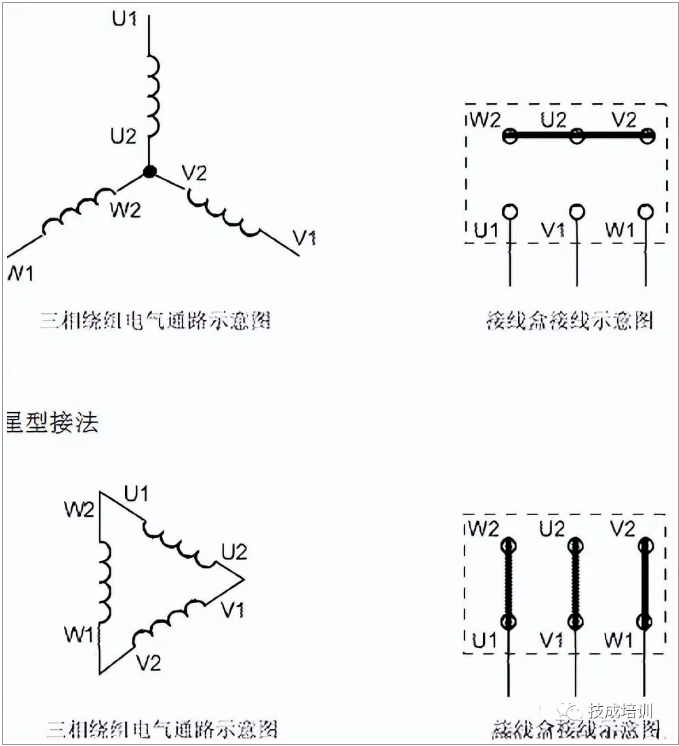
သုံးဆင့် asynchronous မော်တာ၏ ဝါယာကြိုးခြောက်ချောင်းကို အခြေခံချိတ်ဆက်မှုနည်းလမ်းနှစ်ခုအဖြစ် ခွဲခြားနိုင်သည်- delta delta connection နှင့် star connection။
ဝါယာကြိုးခြောက်ချောင်း=မော်တာဝါယာကြိုးသုံးခု=ခေါင်းအဖျားသုံးခု+အမြီးအဖျားသုံးခု၊ တူညီသောဝါယာကြိုး၏ ခေါင်းနှင့်အမြီးအဖျားများအကြား ချိတ်ဆက်မှုကို တိုင်းတာသည့် မာလ်တီမီတာတစ်ခုပါရှိပြီး၊ ဆိုလိုသည်မှာ U1-U2၊ V1-V2၊ W1-W2။
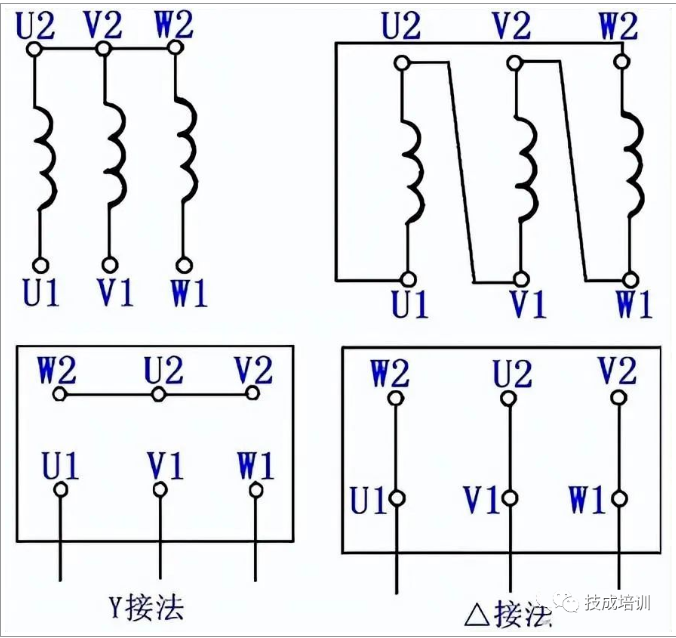
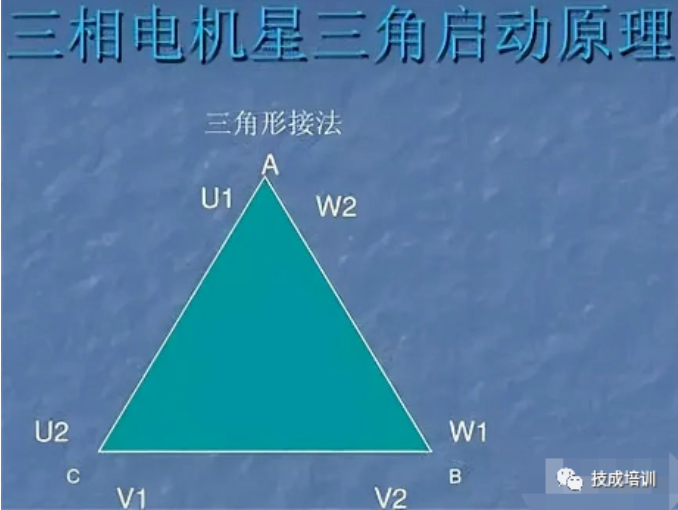
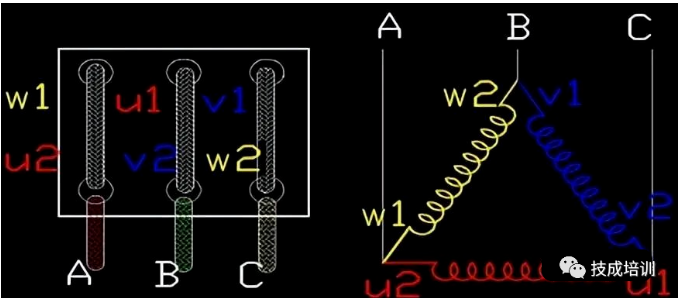
၁။ သုံးဆင့် asynchronous မော်တာများအတွက် တြိဂံ delta ချိတ်ဆက်မှုနည်းလမ်း
တြိဂံ delta ချိတ်ဆက်မှုနည်းလမ်းသည် ပုံတွင်ပြထားသည့်အတိုင်း တြိဂံတစ်ခုဖွဲ့စည်းရန် ዑደ့သုံးခု၏ ခေါင်းများနှင့် အမြီးများကို အစဉ်လိုက်ချိတ်ဆက်ရန်ဖြစ်သည်။
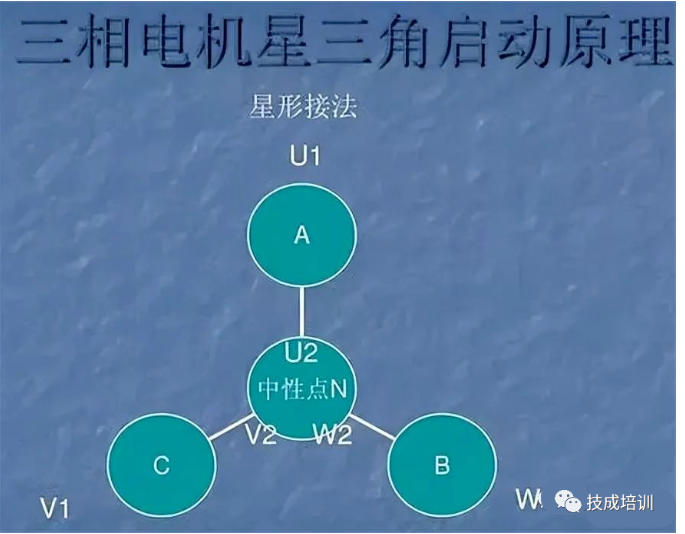
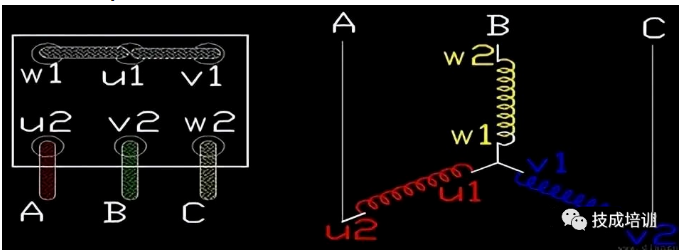
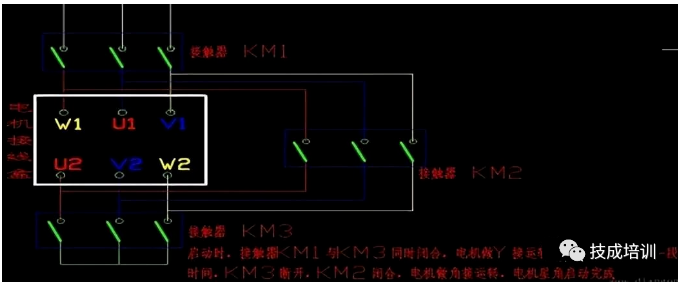
၂။ သုံးဆင့် asynchronous မော်တာများအတွက် ကြယ်ပွင့်ချိတ်ဆက်မှုနည်းလမ်း
ကြယ်ပွင့်ချိတ်ဆက်မှုနည်းလမ်းမှာ ဝါယာကြိုးသုံးခု၏ အမြီး သို့မဟုတ် ခေါင်းအဆုံးများကို ချိတ်ဆက်ရန်ဖြစ်ပြီး ကျန်ဝါယာကြိုးသုံးခုကို ပါဝါချိတ်ဆက်မှုအဖြစ် အသုံးပြုသည်။ ပုံတွင်ပြထားသည့်အတိုင်း ချိတ်ဆက်နည်းလမ်း-
ပုံများနှင့်စာသားများတွင် Three Phase Asynchronous Motor ၏ Wiring Diagram ကိုရှင်းလင်းချက်
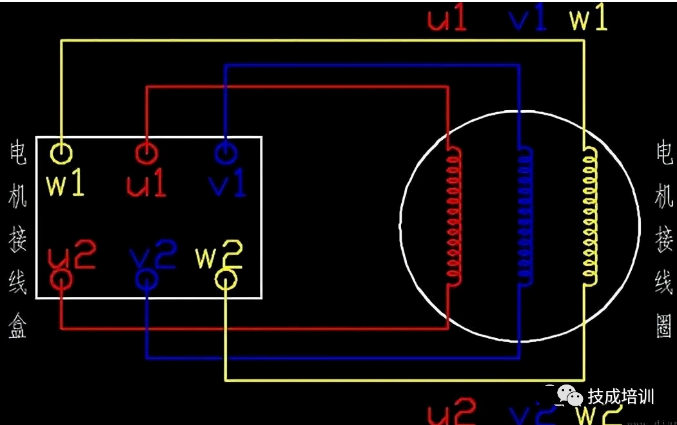
သုံးဆင့်မော်တာ ချိတ်ဆက်သေတ္တာ
သုံးဆင့် asynchronous မော်တာကို ချိတ်ဆက်သောအခါ၊ junction box ရှိ ချိတ်ဆက်သည့်အပိုင်း၏ ချိတ်ဆက်နည်းလမ်းမှာ အောက်ပါအတိုင်းဖြစ်သည်။
သုံးဆင့် asynchronous မော်တာကို ထောင့်တွင် ချိတ်ဆက်ထားသောအခါ၊ junction box ချိတ်ဆက်မှုအပိုင်း၏ ချိတ်ဆက်နည်းလမ်းမှာ အောက်ပါအတိုင်းဖြစ်သည်။
three-phase asynchronous မော်တာများအတွက် ချိတ်ဆက်နည်း နှစ်မျိုးရှိသည်- star connection နှင့် triangle connection။
တြိဂံပုံနည်းလမ်း
ဗို့အားနှင့် ဝါယာကြိုးအချင်းတူညီသော ကွေးညွှတ်ကွိုင်များတွင်၊ ကြယ်ပွင့်ချိတ်ဆက်မှုနည်းလမ်းသည် အဆင့်တစ်ခုလျှင် လည်ပတ်မှုသုံးဆ (၁.၇၃၂ ဆ) လျော့နည်းပြီး တြိဂံချိတ်ဆက်မှုနည်းလမ်းထက် ပါဝါသုံးဆလျော့နည်းသည်။ အပြီးသတ်မော်တာ၏ ချိတ်ဆက်မှုနည်းလမ်းကို 380V ဗို့အားကို ခံနိုင်ရည်ရှိအောင် ပြုပြင်ထားပြီး ယေဘုယျအားဖြင့် ပြုပြင်မွမ်းမံရန် မသင့်တော်ပါ။
သုံးဆင့်ဗို့အားအဆင့်သည် ပုံမှန် 380V နှင့် မတူညီသည့်အခါတွင်သာ ချိတ်ဆက်နည်းလမ်းကို ပြောင်းလဲနိုင်သည်။ ဥပမာအားဖြင့် သုံးဆင့်ဗို့အားအဆင့်သည် 220V ဖြစ်သည့်အခါ မူရင်းသုံးဆင့်ဗို့အား 380V ၏ ကြယ်ပွင့်ချိတ်ဆက်နည်းလမ်းကို တြိဂံချိတ်ဆက်နည်းလမ်းသို့ ပြောင်းလဲခြင်းသည် အသုံးချနိုင်သည်။ သုံးဆင့်ဗို့အားအဆင့်သည် 660V ဖြစ်သည့်အခါ မူရင်းသုံးဆင့်ဗို့အား 380V ဒယ်လ်တာချိတ်ဆက်နည်းလမ်းကို ကြယ်ပွင့်ချိတ်ဆက်နည်းလမ်းသို့ ပြောင်းလဲနိုင်ပြီး ၎င်း၏ပါဝါသည် မပြောင်းလဲပါ။ ယေဘုယျအားဖြင့် ပါဝါနည်းမော်တာများကို ကြယ်ပွင့်ချိတ်ဆက်ထားပြီး ပါဝါမြင့်မော်တာများကို ဒယ်လ်တာချိတ်ဆက်ထားသည်။
အဆင့်သတ်မှတ်ထားသောဗို့အားတွင် delta ချိတ်ဆက်ထားသောမော်တာကိုအသုံးပြုသင့်သည်။ ၎င်းကို star ချိတ်ဆက်ထားသောမော်တာသို့ပြောင်းလဲပါက ၎င်းသည် လျှော့ချထားသောဗို့အားလည်ပတ်မှုနှင့်သက်ဆိုင်ပြီး မော်တာပါဝါနှင့် စတင်လည်ပတ်မှုလျှပ်စီးကြောင်းလျော့ကျစေသည်။ ပါဝါမြင့်မော်တာကိုစတင်သောအခါ (delta ချိတ်ဆက်မှုနည်းလမ်း) လျှပ်စီးကြောင်းသည် အလွန်မြင့်မားသည်။ လိုင်းပေါ်တွင် စတင်လည်ပတ်မှုလျှပ်စီးကြောင်း၏သက်ရောက်မှုကိုလျှော့ချရန်အတွက် step-down စတင်ခြင်းကို အများအားဖြင့်အသုံးပြုကြသည်။ နည်းလမ်းတစ်ခုမှာ စတင်ရန်အတွက် မူလ delta ချိတ်ဆက်မှုနည်းလမ်းကို star ချိတ်ဆက်မှုနည်းလမ်းသို့ပြောင်းလဲခြင်းဖြစ်သည်။ star ချိတ်ဆက်မှုနည်းလမ်းကိုစတင်ပြီးနောက် ၎င်းကိုလည်ပတ်ရန်အတွက် delta ချိတ်ဆက်မှုနည်းလမ်းသို့ပြန်လည်ပြောင်းလဲသည်။
သုံးဆင့် asynchronous မော်တာ၏ ဝါယာကြိုးပုံ
သုံးဆင့် asynchronous မော်တာများအတွက် forward နှင့် reverse transfer လိုင်းများ၏ ရုပ်ပိုင်းဆိုင်ရာပုံ-
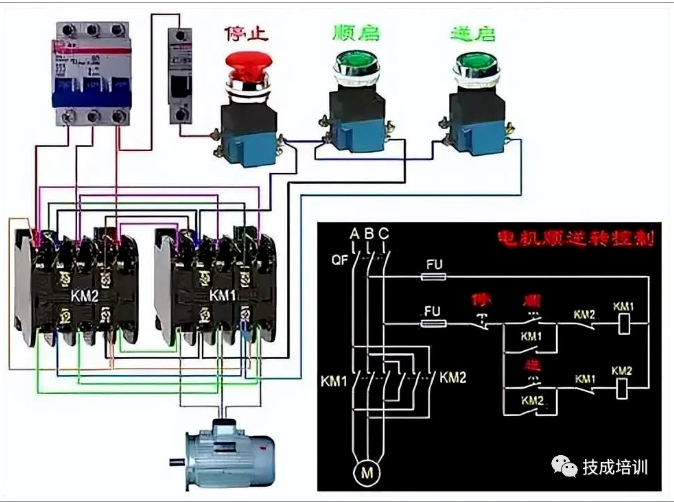
မော်တာတစ်လုံးကို ရှေ့သို့နှင့်နောက်သို့ ထိန်းချုပ်နိုင်ရန်အတွက် ၎င်း၏ ပါဝါထောက်ပံ့မှု၏ မည်သည့်အဆင့်နှစ်ခုကိုမဆို အပြန်အလှန် ချိန်ညှိနိုင်သည် (ကျွန်ုပ်တို့က ၎င်းကို commutation ဟုခေါ်သည်)။ ပုံမှန်အားဖြင့် V အဆင့်သည် မပြောင်းလဲဘဲ U အဆင့်နှင့် W အဆင့်ကို အပြန်အလှန် ချိန်ညှိသည်။ contactor နှစ်ခု လုပ်ဆောင်သောအခါ မော်တာ၏ phase sequence ကို ယုံကြည်စိတ်ချစွာ လဲလှယ်နိုင်စေရန်အတွက် ဝါယာကြိုးများသည် contact ၏ အပေါ်ဘက် port တွင် တသမတ်တည်းရှိရမည်ဖြစ်ပြီး phase ကို contactor ၏ အောက်ဘက် port တွင် ချိန်ညှိသင့်သည်။ phase နှစ်ခု၏ phase sequence လဲလှယ်မှုကြောင့် KM coil နှစ်ခုကို တစ်ပြိုင်နက်တည်း ပါဝါမဖွင့်နိုင်ကြောင်း သေချာစေရန် လိုအပ်သည်၊ မဟုတ်ပါက phase to phase short circuit ချို့ယွင်းမှုများ ဖြစ်ပေါ်နိုင်သည်။ ထို့ကြောင့် interlocking ကို လက်ခံကျင့်သုံးရမည်။
ဘေးကင်းရေးအကြောင်းပြချက်များအတွက်၊ ခလုတ်ချိတ်ဆက်မှု (စက်ပိုင်းဆိုင်ရာ) နှင့် contactor ချိတ်ဆက်မှု (လျှပ်စစ်) ပါရှိသော double interlocking forward နှင့် reverse control circuit ကို မကြာခဏအသုံးပြုလေ့ရှိသည်။ button interlocking ကိုအသုံးပြုခြင်းဖြင့်၊ forward နှင့် reverse ခလုတ်များကို တစ်ပြိုင်နက်နှိပ်ထားသော်လည်း၊ phase ချိန်ညှိမှုအတွက်အသုံးပြုသော contactor နှစ်ခုကို တစ်ပြိုင်နက်ဖွင့်၍မရပါ၊ ထို့ကြောင့် phase မှ phase သို့ short circuit များကို စက်ပိုင်းဆိုင်ရာအရ ရှောင်ရှားနိုင်သည်။
ထို့အပြင်၊ အသုံးပြုထားသော contactor များ၏ interlocking ကြောင့် contactor တစ်ခုခုသည် ပါဝါဖွင့်ထားသရွေ့ ၎င်း၏ရှည်လျားသော closed contact သည် ပိတ်မည်မဟုတ်ပါ။ ဤနည်းအားဖြင့် mechanical နှင့် electrical dual interlocking ကို အသုံးပြုရာတွင် မော်တာ၏ power supply system တွင် phase to phase short circuits များ မရှိနိုင်ဘဲ မော်တာကို ထိရောက်စွာ ကာကွယ်ပေးပြီး phase modulation အတွင်း phase to phase short circuits များကြောင့် ဖြစ်ပေါ်လာသော မတော်တဆမှုများကို ရှောင်ရှားနိုင်ပြီး contactor ကို မီးလောင်စေနိုင်သည်။
ပို့စ်တင်ချိန်: ၂၀၂၃ ခုနှစ်၊ သြဂုတ်လ ၇ ရက်


