
သန့်စင်သောလျှပ်စစ်ယာဉ်၏ဖွဲ့စည်းပုံနှင့် ဒီဇိုင်းသည် သမားရိုးကျအတွင်းပိုင်းလောင်ကျွမ်းအင်ဂျင်မောင်းနှင်ထားသောယာဉ်နှင့် ကွဲပြားသည်။ ၎င်းသည် ရှုပ်ထွေးသော စနစ်အင်ဂျင်နီယာလည်း ဖြစ်သည်။ အကောင်းဆုံးထိန်းချုပ်မှုလုပ်ငန်းစဉ်တစ်ခုအောင်မြင်ရန် ပါဝါဘက်ထရီနည်းပညာ၊ မော်တော်ကားမောင်းနှင်မှုနည်းပညာ၊ မော်တော်ကားနည်းပညာနှင့် ခေတ်မီထိန်းချုပ်မှုသီအိုရီတို့ကို ပေါင်းစပ်လုပ်ဆောင်ရန် လိုအပ်ပါသည်။ လျှပ်စစ်မော်တော်ယာဉ်သိပ္ပံနှင့်နည်းပညာဖွံ့ဖြိုးတိုးတက်ရေးအစီအစဥ်တွင်၊ နိုင်ငံသည် "ဒေါင်လိုက်သုံးမျိုးနှင့် အလျားလိုက်သုံးမျိုး" ၏ R&D layout ကို ဆက်လက်လိုက်နာပြီး "အလျားလိုက်သုံးမျိုး" ၏ ဘုံအဓိကသော့ချက်နည်းပညာဆိုင်ရာ သုတေသနကို မီးမောင်းထိုးပြထားသည့် နည်းပညာအသွင်ကူးပြောင်းရေးမဟာဗျူဟာအရ၊ "သန့်စင်သောလျှပ်စစ်ဒရိုက်" ဆိုလိုသည်မှာ drive motor နှင့်၎င်း၏ထိန်းချုပ်မှုစနစ်၊ ပါဝါဘက်ထရီနှင့်၎င်း၏စီမံခန့်ခွဲမှုစနစ်နှင့် powertrain ထိန်းချုပ်မှုစနစ်တို့ကိုသုတေသနပြုသည်။ အဓိက ထုတ်လုပ်သူတိုင်းသည် နိုင်ငံတော် ဖွံ့ဖြိုးတိုးတက်ရေး မဟာဗျူဟာအရ ၎င်း၏ ကိုယ်ပိုင်စီးပွားရေး ဖွံ့ဖြိုးတိုးတက်ရေး မဟာဗျူဟာကို ရေးဆွဲကြသည်။
စာရေးသူသည် စွမ်းအင်ရထားအသစ်၏ ဖွံ့ဖြိုးတိုးတက်မှုလုပ်ငန်းစဉ်တွင် အဓိကနည်းပညာများကို ခွဲထုတ်ထားပြီး သီအိုရီအခြေခံနှင့် ပါဝါရထား၏ ဒီဇိုင်း၊ စမ်းသပ်ခြင်းနှင့် ထုတ်လုပ်ခြင်းအတွက် သီအိုရီအခြေခံနှင့် ကိုးကားချက်တို့ကို ပေးထားသည်။ အဆိုပါအစီအစဥ်အား သန့်စင်သောလျှပ်စစ်ကားများ၏ powertrain တွင် လျှပ်စစ်မောင်းနှင်မှုဆိုင်ရာ အဓိကနည်းပညာများကို ခွဲခြမ်းစိတ်ဖြာရန် အခန်းသုံးပိုင်းခွဲထားသည်။ ဒီနေ့မှာတော့ လျှပ်စစ်မောင်းနည်းပညာရဲ့ နိယာမနဲ့ အမျိုးအစားခွဲခြားမှုကို မိတ်ဆက်ပေးလိုက်ပါတယ်။
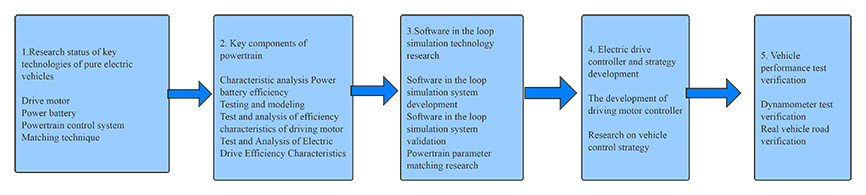
ပုံ 1 Powertrain ဖွံ့ဖြိုးတိုးတက်မှုတွင် အဓိကလင့်ခ်များ
လက်ရှိတွင် သန့်စင်သော လျှပ်စစ်ကားပါဝါရထား၏ အဓိကသော့ချက်နည်းပညာများတွင် အောက်ပါ အမျိုးအစား လေးမျိုး ပါဝင်သည် ။
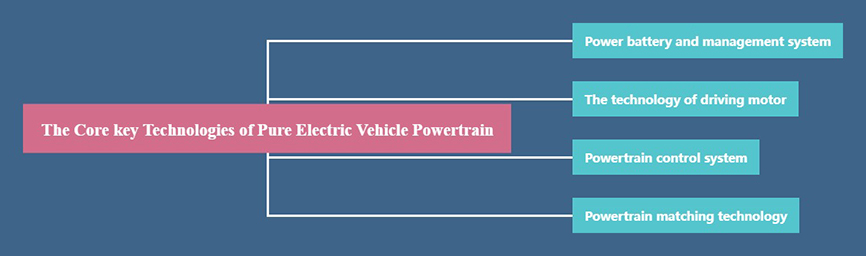
ပုံ 2 Powertrain ၏ အဓိကသော့ချက်နည်းပညာများ
မောင်းနှင်သော မော်တာစနစ်၏ အဓိပ္ပါယ်
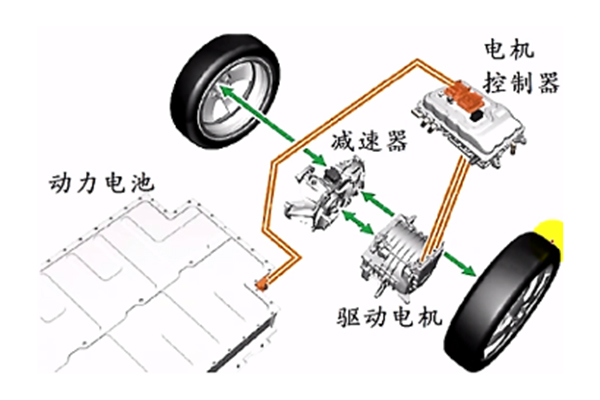
ယာဉ်ပါဝါဘက်ထရီ၏ အခြေအနေနှင့် ယာဉ်ပါဝါလိုအပ်ချက်များအရ၊ ၎င်းသည် ယာဉ်ပေါ်ရှိ စွမ်းအင်သိုလှောင်မှု ပါဝါထုတ်လုပ်သည့်ကိရိယာမှ လျှပ်စစ်စွမ်းအင်ထွက်ရှိမှုကို စက်စွမ်းအင်အဖြစ်သို့ ပြောင်းလဲပေးကာ စွမ်းအင်ကို ထုတ်လွှင့်သည့်ကိရိယာမှတစ်ဆင့် မောင်းနှင်ဘီးများသို့ ပေးပို့ကာ အစိတ်အပိုင်းများ၊ ယာဉ်၏စက်ပိုင်းဆိုင်ရာစွမ်းအင်ကို လျှပ်စစ်စွမ်းအင်အဖြစ်သို့ ပြောင်းလဲပြီး ယာဉ်ဘရိတ်သောအခါတွင် စွမ်းအင်သိုလှောင်သည့်ကိရိယာသို့ ပြန်လည်ဖြည့်သွင်းသည်။ လျှပ်စစ်မောင်းနှင်မှုစနစ်တွင် မော်တာ၊ ဂီယာယန္တရား၊ မော်တာထိန်းချုပ်ကိရိယာနှင့် အခြားအစိတ်အပိုင်းများ ပါဝင်သည်။ လျှပ်စစ်စွမ်းအင် မောင်းနှင်မှုစနစ်၏ နည်းပညာဆိုင်ရာ ကန့်သတ်ချက်များ ဒီဇိုင်းတွင် အဓိကအားဖြင့် ပါဝါ၊ ရုန်းအား၊ အမြန်နှုန်း၊ ဗို့အား၊ ဂီယာအချိုး၊ ပါဝါထောက်ပံ့နိုင်စွမ်း၊ အထွက်ပါဝါ၊ ဗို့အား၊ လျှပ်စစ်၊ စသည်တို့ ပါဝင်သည်။

1) မော်တာထိန်းချုပ်ကိရိယာ
အင်ဗာတာဟုလည်း ခေါ်သည်၊ ၎င်းသည် ပါဝါဘက်ထရီအိတ်မှ တိုက်ရိုက်လျှပ်စီးဝင်မှုကို လျှို့ဝှက်လျှပ်စီးကြောင်းသို့ ပြောင်းလဲပေးသည်။ အဓိကအစိတ်အပိုင်းများ-
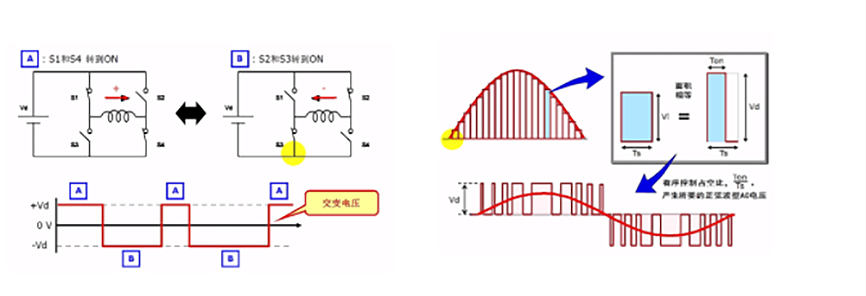
◎ IGBT- ပါဝါအီလက်ထရွန်းနစ်ခလုတ်၊ နိယာမ- ထိန်းချုပ်ကိရိယာမှတစ်ဆင့်၊ ကြိမ်နှုန်းနှင့် စီတန်းခလုတ်တစ်ခုကို ပိတ်ရန် IGBT တံတားလက်တံကို ထိန်းချုပ်ပြီး သုံးဆင့်မြောက်လျှပ်စီးကြောင်းကို ထုတ်ပေးသည်။ ပါဝါအီလက်ထရွန်းနစ်ခလုတ်ကို ပိတ်ရန် ထိန်းချုပ်ခြင်းဖြင့်၊ လျှပ်လှည့်ဗို့အားကို ပြောင်းလဲနိုင်သည်။ ထို့နောက် တာဝန်လည်ပတ်မှုကို ထိန်းချုပ်ခြင်းဖြင့် AC ဗို့အားကို ထုတ်ပေးသည်။
◎ ရုပ်ရှင်စွမ်းရည်- စစ်ထုတ်ခြင်းလုပ်ဆောင်ချက်၊ လက်ရှိအာရုံခံကိရိယာ- အဆင့်သုံးဆင့် အကွေ့အကောက်များ၏ လက်ရှိကို ထောက်လှမ်းခြင်း။
2) ထိန်းချုပ်မှုနှင့် မောင်းနှင်မှုပတ်လမ်း- ကွန်ပျူတာ ထိန်းချုပ်ဘုတ်၊ IGBT မောင်းနှင်ခြင်း။
မော်တာထိန်းချုပ်ကိရိယာ၏ အခန်းကဏ္ဍမှာ DC အား AC သို့ ပြောင်းရန်၊ အချက်ပြမှုတစ်ခုစီကို လက်ခံရန်နှင့် သက်ဆိုင်ရာ ပါဝါနှင့် ရုန်းအားကို ထုတ်ပေးရန်ဖြစ်သည်။ Core အစိတ်အပိုင်းများ- ပါဝါအီလက်ထရွန်းနစ်ခလုတ်၊ ဖလင်ကာပတ်စီတာ၊ လက်ရှိအာရုံခံကိရိယာ၊ မတူညီသောခလုတ်များကိုဖွင့်ရန် ထိန်းချုပ်မောင်းနှင်ပတ်လမ်း၊ မတူညီသောလမ်းကြောင်းများတွင် လျှပ်စီးကြောင်းများဖွဲ့စည်းကာ အစားထိုးဗို့အားကိုထုတ်ပေးသည်။ ထို့ကြောင့်၊ ကျွန်ုပ်တို့သည် sinusoidal alternating current ကို စတုဂံများအဖြစ် ပိုင်းခြားနိုင်ပါသည်။ ထောင့်မှန်စတုဂံများ၏ ဧရိယာကို တူညီသောအမြင့်ဖြင့် ဗို့အားအဖြစ်သို့ ပြောင်းလဲသည်။ x-axis သည် တာဝန်စက်ဝန်းကို ထိန်းချုပ်ခြင်းဖြင့် အရှည်ထိန်းချုပ်မှုကို သိရှိပြီး နောက်ဆုံးတွင် ဧရိယာ၏ ညီမျှသောပြောင်းလဲခြင်းကို နားလည်သည်။ ဤနည်းဖြင့်၊ သုံးဆင့် AC ပါဝါထုတ်လုပ်ရန် controller မှတဆင့် IGBT တံတားလက်တံကို တိကျသောကြိမ်နှုန်းနှင့် sequence switch တွင်ပိတ်ရန် DC ပါဝါကို ထိန်းချုပ်နိုင်သည်။
လက်ရှိတွင်၊ drive circuit ၏ အဓိက အစိတ်အပိုင်းများသည် တင်သွင်းမှုများအပေါ် အားကိုးသည်- capacitors၊ IGBT/MOSFET switch tubes၊ DSP၊ electronic chips နှင့် integrated circuits များသည် သီးခြားလွတ်လပ်စွာ ထုတ်လုပ်နိုင်သော်လည်း စွမ်းဆောင်ရည် အားနည်းသည်- အထူးဆားကစ်များ၊ အာရုံခံကိရိယာများ၊ ချိတ်ဆက်မှုများ၊ သီးခြားထုတ်လုပ်သည်- ပါဝါထောက်ပံ့ရေးပစ္စည်းများ၊ ဒိုင်အိုဒက်များ၊ လျှပ်ကူးကိရိယာများ၊ အလွှာပေါင်းစုံဆားကစ်ဘုတ်များ၊ လျှပ်ကာဝါယာကြိုးများ၊ ရေတိုင်ကီများ။
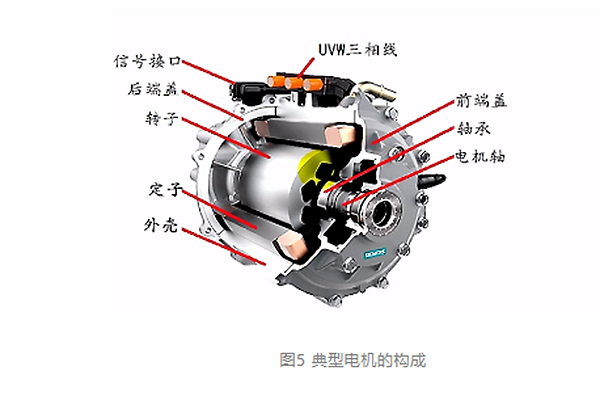
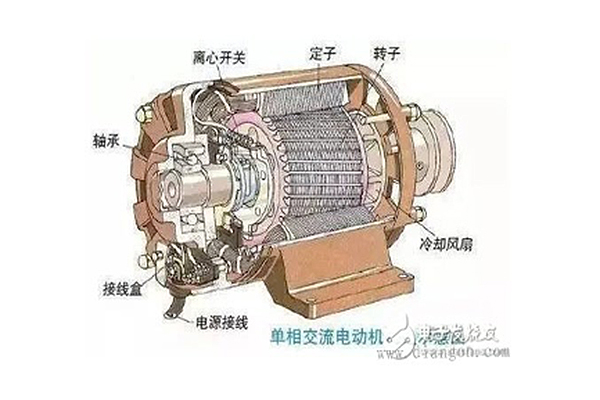
3) မော်တာ- သုံးဆင့်လျှပ်စီးကြောင်းကို စက်ယန္တရားအဖြစ်သို့ ပြောင်းလဲပါ။
◎ဖွဲ့စည်းပုံ- ရှေ့နှင့်နောက်ဖုံးများ၊ အခွံများ၊ ရှပ်များနှင့် ဝက်ဝံများ
◎ သံလိုက်ပတ်လမ်း- stator core၊ ရဟတ်အူတိုင်
◎ ပတ်လမ်း- stator အကွေ့အကောက်များ၊ ရဟတ်စပယ်ယာ
4) ပို့လွှတ်သည့်ကိရိယာ
ဂီယာဘောက်စ် သို့မဟုတ် အလျှော့ပေးကိရိယာသည် မော်တာမှ ရုန်းအားအမြန်နှုန်းကို ကားတစ်ခုလုံးလိုအပ်သော အမြန်နှုန်းနှင့် ရုန်းအားအဖြစ်သို့ ပြောင်းလဲပေးသည်။
မောင်းနှင်သော မော်တာအမျိုးအစား
မောင်းနှင်သော မော်တာများကို အောက်ပါ အမျိုးအစား လေးမျိုး ခွဲခြားထားပါသည်။ လက်ရှိတွင်၊ AC induction motor နှင့် အမြဲတမ်း magnet synchronous motors များသည် စွမ်းအင်သစ်လျှပ်စစ်ကားများတွင် အသုံးအများဆုံးအမျိုးအစားများဖြစ်သည်။ ထို့ကြောင့် ကျွန်ုပ်တို့သည် AC induction motor နှင့် အမြဲတမ်း magnet synchronous motor တို့၏ နည်းပညာကို အာရုံစိုက်ပါသည်။
| DC မော်တော် | AC Induction Motor | Permanent Magnet Synchronous Motor | တွန့်ဆုတ်နေသော မော်တာကို ပြောင်းထားသည်။ | |
| အားသာချက် | ကုန်ကျစရိတ်သက်သာပြီး ထိန်းချုပ်မှုစနစ်၏ လိုအပ်ချက်များ နည်းပါးသည်။ | ကုန်ကျစရိတ်သက်သာခြင်း၊ ကျယ်ပြန့်သောပါဝါလွှမ်းခြုံမှု၊ တီထွင်ထားသောထိန်းချုပ်မှုနည်းပညာ၊ ယုံကြည်စိတ်ချရမှုမြင့်မားသည်။ | မြင့်မားသောစွမ်းအားသိပ်သည်းဆ၊ မြင့်မားသောစွမ်းဆောင်ရည်၊ သေးငယ်သောအရွယ်အစား | ရိုးရှင်းသောဖွဲ့စည်းပုံ၊ ထိန်းချုပ်မှုစနစ်၏လိုအပ်ချက်နည်းပါးသည်။ |
| အားနည်းချက် | မြင့်မားသောပြုပြင်ထိန်းသိမ်းမှုလိုအပ်ချက်များ၊ မြန်နှုန်းနိမ့်၊ torque နည်းပါးသည်၊ သက်တမ်းတိုသည်။ | သေးငယ်သော ထိရောက်မှုရှိသော ဧရိယာ ပါဝါသိပ်သည်းမှု နည်းပါးခြင်း။ | ကုန်ကျစရိတ် မြင့်မားသော ပတ်ဝန်းကျင် လိုက်လျောညီထွေမှု ညံ့ဖျင်းခြင်း။ | ကြီးမားသော torque အတက်အကျ မြင့်မားသော အလုပ်လုပ်သည့် ဆူညံသံ |
| လျှောက်လွှာ | အသေးစား သို့မဟုတ် မြန်နှုန်းနိမ့် လျှပ်စစ်ကားငယ် | လျှပ်စစ်လုပ်ငန်းသုံးယာဉ်နှင့် ခရီးသည်တင်ကားများ | လျှပ်စစ်လုပ်ငန်းသုံးယာဉ်နှင့် ခရီးသည်တင်ကားများ | လျှပ် စစ်ဓာတ်အားသုံးယာဉ် |
 1) AC Induction Asynchronous Motor
1) AC Induction Asynchronous Motor
AC inductive asynchronous motor ၏ လုပ်ဆောင်မှု နိယာမမှာ အကွေ့အကောက်များသည် stator slot နှင့် rotor မှတဆင့် ဖြတ်သန်းသွားရမည် ဖြစ်သည်၊ ၎င်းကို သံမဏိ အလွှာပါးများဖြင့် သံလိုက်လျှပ်ကူးမှု မြင့်မားသော သံမဏိအလွှာများဖြင့် စီထားသည်။ သုံးဆင့်လျှပ်စစ်သည် အကွေ့အကောက်များကို ဖြတ်သန်းသွားမည်ဖြစ်သည်။ Faraday ၏လျှပ်စစ်သံလိုက်လျှပ်ကူးနည်းဥပဒေအရ rotating magnetic field သည် rotor လည်ပတ်ရသည့် အကြောင်းရင်းဖြစ်သည်။ stator ၏ကွိုင်သုံးခုကို 120 ဒီဂရီအကွာအဝေးတွင် ချိတ်ဆက်ထားပြီး လက်ရှိသယ်ဆောင်နေသော conductor သည် ၎င်းတို့ပတ်ဝန်းကျင်ရှိ သံလိုက်စက်ကွင်းများကိုထုတ်ပေးသည်။ ဤအထူးအစီအစဉ်တွင် ပါဝါသုံးဆင့်ပါဝါထောက်ပံ့မှုကို အသုံးချသောအခါ၊ တိကျသောအချိန်တစ်ခုတွင် သမရိုးကျလျှပ်စီးကြောင်းပြောင်းလဲမှုနှင့်အတူ သံလိုက်စက်ကွင်းများသည် တူညီသောလှည့်ပတ်မှုပြင်းထန်မှုနှင့်အတူ သံလိုက်စက်ကွင်းတစ်ခုဖြစ်ပေါ်စေသည်။ သံလိုက်စက်ကွင်း၏ လှည့်နှုန်းကို synchronous speed ဟုခေါ်သည်။ Faraday ၏ နိယာမအရ အပိတ်စပယ်ယာကို အတွင်းဘက်တွင် ချထားသည်ဆိုပါစို့၊ သံလိုက်စက်ကွင်းသည် ပြောင်းလဲနိုင်သောကြောင့်၊ loop သည် loop အတွင်းရှိ current ထုတ်ပေးမည့် electromotive force ကို အာရုံခံနိုင်မည်ဖြစ်သည်။ ဤအခြေအနေသည် သံလိုက်စက်ကွင်းရှိ လက်ရှိသယ်ဆောင်သည့် ကြိုးနှင့်တူပြီး ကြိုးကွင်းပေါ်ရှိ လျှပ်စစ်သံလိုက်စွမ်းအားကို ထုတ်ပေးကာ Huan Jiang သည် စတင်လည်ပတ်သည်။ ရှဉ့်လှောင်အိမ်နှင့် ဆင်တူသောအရာကို အသုံးပြု၍ အဆင့်သုံးဆင့် အလှည့်ကျလျှပ်စီးကြောင်းသည် stator မှတဆင့် လည်ပတ်နေသော သံလိုက်စက်ကွင်းကို ထုတ်ပေးမည်ဖြစ်ပြီး၊ ၎င်းသည် ရှဉ့်လှောင်အိမ်အတွင်း လျှပ်စီးကြောင်းကို အဆုံးကွင်းဖြင့် တိုစေသောကြောင့် ရဟတ်သည် စတင်လည်ပတ်မည်၊ မော်တာကို ဘာကြောင့် induction motor လို့ခေါ်တာလဲ။ လျှပ်စစ်သံလိုက်လျှပ်စစ်ဓာတ်အားသွင်းစက်၏အကူအညီဖြင့် လျှပ်စစ်ဓာတ်အားရရှိစေရန် rotor နှင့်တိုက်ရိုက်ချိတ်ဆက်မည့်အစား၊ လျှပ်စစ်သံလိုက်အူတိုင်အမှုန်အမွှားများကို rotor တွင်ဖြည့်သွင်းပေးသောကြောင့် သေးငယ်သောအရွယ်အစားသံသည် အနည်းဆုံး eddy current ဆုံးရှုံးမှုကိုသေချာစေသည်။
2) AC synchronous မော်တာ
synchronous motor ၏ rotor သည် asynchronous motor နှင့် ကွဲပြားသည်။ အမြဲတမ်း သံလိုက်ကို မျက်နှာပြင်တပ်ဆင်ထားသော အမျိုးအစားနှင့် မြှုပ်သွင်းထားသည့် အမျိုးအစားဟူ၍ ခွဲခြားနိုင်သည့် ရဟတ်ပေါ်တွင် တပ်ဆင်ထားသည်။ ရဟတ်ကို ဆီလီကွန်စတီးပြားဖြင့် ပြုလုပ်ထားပြီး အမြဲတမ်းသံလိုက်ကို ထည့်သွင်းထားသည်။ stator သည် sine wave alternating current ၏ အရွယ်အစားနှင့် အဆင့်ကို ထိန်းချုပ်သည့် အဆင့်ကွာခြားချက် 120 ရှိသော လျှပ်စီးကြောင်းနှင့် ချိတ်ဆက်ထားသောကြောင့် stator မှထုတ်ပေးသော သံလိုက်စက်ကွင်းသည် rotor မှထုတ်ပေးသော သံလိုက်နှင့် ဆန့်ကျင်ဘက်ဖြစ်နေစေရန်၊ အကွက်သည် လှည့်နေသည်။ ဤနည်းအားဖြင့် stator အား သံလိုက်ဖြင့် ဆွဲဆောင်ပြီး ရဟတ်ဖြင့် လှည့်သည်။ လည်ပတ်ပြီးနောက် စက်ဝန်းအား stator နှင့် rotor စုပ်ယူမှုဖြင့် ထုတ်ပေးသည်။
နိဂုံး- လျှပ်စစ်ကားများအတွက် မော်တာမောင်းနှင်မှုသည် အခြေခံအားဖြင့် ပင်မရေစီးကြောင်းဖြစ်လာသော်လည်း ၎င်းသည် တစ်ခုတည်းမဟုတ်သော်လည်း ကွဲပြားသည်။ မော်တာမောင်းစနစ်တစ်ခုစီတွင် ၎င်း၏ကိုယ်ပိုင် ပြည့်စုံသောအညွှန်းရှိသည်။ စနစ်တစ်ခုစီကို လက်ရှိလျှပ်စစ်ယာဉ်မောင်းနှင်မှုတွင် ကျင့်သုံးသည်။ ၎င်းတို့ထဲမှအများစုမှာ asynchronous motors များနှင့် အမြဲတမ်း magnet synchronous motors များဖြစ်ပြီး အချို့က တုံ့ဆိုင်းနေသော motor များကို ပြောင်းရန် ကြိုးစားကြသည်။ မော်တာမောင်းသည် ပါဝါအီလက်ထရွန်နစ်နည်းပညာ၊ မိုက်ခရိုအီလက်ထရွန်းနစ်နည်းပညာ၊ ဒစ်ဂျစ်တယ်နည်းပညာ၊ အလိုအလျောက်ထိန်းချုပ်မှုနည်းပညာ၊ ရုပ်ပိုင်းဆိုင်ရာသိပ္ပံနှင့် အခြားပညာရပ်များကို ပေါင်းစပ်အသုံးချကာ နယ်ပယ်ပေါင်းစုံ၏ ကျယ်ကျယ်ပြန့်ပြန့် အသုံးချမှုနှင့် ဖွံ့ဖြိုးတိုးတက်မှုအလားအလာများကို ထင်ဟပ်စေကြောင်း ထောက်ပြထိုက်ပါသည်။ ၎င်းသည် လျှပ်စစ်ကားမော်တာများတွင် အားကောင်းသော ပြိုင်ဖက်ဖြစ်သည်။ အနာဂတ် လျှပ်စစ်ကားများတွင် နေရာတစ်ခု သိမ်းပိုက်နိုင်ရန်၊ မော်တာ အမျိုးအစားအားလုံးသည် မော်တာဖွဲ့စည်းပုံကို ကောင်းမွန်အောင်ပြုလုပ်ရန်သာမက ထိန်းချုပ်မှုစနစ်၏ အသိဉာဏ်နှင့် ဒစ်ဂျစ်တယ် အသွင်အပြင်များကို အဆက်မပြတ် ရှာဖွေရန် လိုအပ်ပါသည်။
စာတိုက်အချိန်- Jan-30-2023


